Исследователи разработали подход SimPLE, который позволяет роботам захватывать, перехватывать и размещать объекты с помощью их моделей, созданных в системе автоматизированного проектирования (CAD). Этот метод помогает роботам выполнять задачи с точностью, которая необходима для промышленных приложений, таких как сборка, упаковка и инспекция.
Машины типа pick-and-place (захват и размещение) уже широко используются в различных отраслях, однако их возможности ограничены, особенно когда речь идет о необходимости точного выполнения множества разных задач. Модель SimPLE решает эту проблему, обеспечивая гибкость и точность без необходимости в предварительном обучении или адаптации к конкретным объектам.
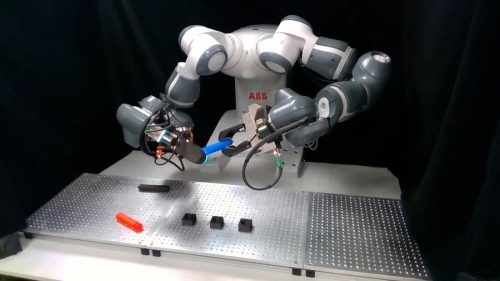
Решение SimPLE для захвата и размещения объектов
Модель SimPLE, разработанная в Лаборатории манипуляции и механизмов MIT (MCube), использует роботов с двумя манипуляторами, которые оснащены сенсорами для восприятия на основе зрения и тактильных ощущений. Это позволяет роботу не только захватывать объекты, но и адаптироваться к их форме и расположению. SimPLE учится на основе компьютерных симуляций, что позволяет роботу выполнять задачи без предыдущего опыта с конкретными объектами.
В экспериментах робот успешно продемонстрировал способность работать с разнообразными объектами, достигая успеха в 90% случаев при работе с шестью объектами и более 80% с одиннадцатью.
Гибкость и точность для промышленного применения
Руководитель проекта Альберто Родригес, научный сотрудник MIT и Boston Dynamics, отметил, что SimPLE предлагает решение, которое можно использовать для многих задач в промышленности без необходимости сложных инженерных доработок. По словам экспертов, таких как Кен Голдберг из Калифорнийского университета в Беркли, эта методика может значительно улучшить производительность и найти немедленное применение в индустрии.