Робот-собака Spot, способный избегать препятствий и легко подниматься по лестницам, используется на различных объектах, включая строительство горного туннеля. Профессор Ямашита, который исследует дистанционное управление роботами, разработал систему измерения туннелей с использованием этого робота.
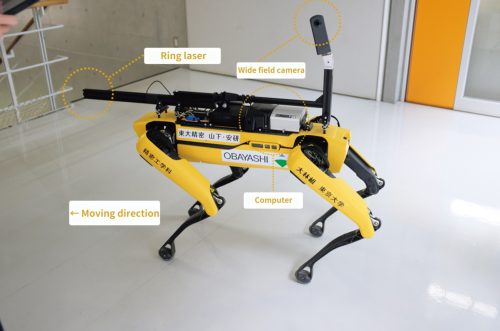
Spot — это автономный робот на четырех ногах, созданный компанией Boston Dynamics. Лаборатория профессора Ямашиты оборудовала его 3D-измерительным устройством. Заранее настроив маршрут, робот может следовать ему автономно. Альтернативой является установка измерительного устройства на штатив, однако это требует частого изменения угла и может занимать целый день, тогда как Spot справляется с этой задачей за 10 минут.
Эффективное измерение туннелей с помощью роботов
В сотрудничестве с Obayashi Corporation была разработана система для точного и легкого измерения поперечных сечений туннеля с использованием дрона и робособаки Spot.
При строительстве туннелей необходимо точно измерять их размеры, чтобы убедиться в соответствии проекта. Обычно это делается вручную с использованием платформ и измерительных инструментов, что требует времени и усилий. Существуют различные устройства для измерения расстояний, однако создание точной 3D-модели туннеля с их помощью является сложной задачей. Для решения этой проблемы была разработана система с использованием роботов и автоматизации, которая позволяет эффективно измерять туннель.
Сокращение времени измерений
Используя Spot с измерительным устройством и дрон, можно измерить все поперечные сечения туннеля с разных углов и получить 3D-данные о его внутренней форме. С применением робота на измерение уходит всего одна тридцатая от времени, требуемого для традиционного метода.
Spot способен плавно перемещаться по неровной поверхности и автоматически избегать препятствий. Управлять роботом можно, как игровым контроллером: достаточно наклонить рычаг в нужную сторону. В условиях сокращения населения в Японии автоматизация становится важным элементом для продолжения строительства туннелей и обеспечения их точного возведения. В будущем планируется использовать эту систему для инспекции мостов и других объектов.
Дальнейшие разработки в лаборатории
Лаборатория профессора Ямашиты также занимается другими исследованиями в области дистанционного управления роботами. Например, разрабатывается система для получения изображений окружающей среды с помощью робота с третьего лица и технологии флуороскопии. Исследования направлены на создание полезных для общества технологий.